專心 創新 匠心


.jpg)
.jpg)



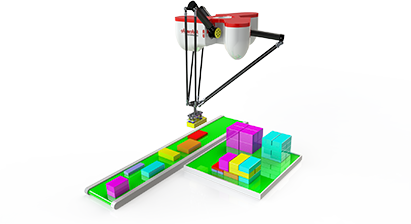
行業應用




服務體係
2小時響應,24小時抵達,72小時解決問題是我們始終堅持的售後服務追求



地址:天津濱海新區南海路156號泰達智能無人裝備產業園29號
首席技術官聯絡郵箱: cto@tjsmskt.com
簡曆投遞郵箱:cxhr@tjsmskt.com
商務合作郵箱:zhangxiaonan@tjsmskt.com